| PLC-AUTOMATIZACE - DATA - KÓDOVÁNÍ / DEKÓDOVÁNÍ -
KÓD PRO INKREMENTÁLNÍ SNÍMAČE |
Provoz webu zajišťuje:

|
KÓD PRO INKREMENTÁLNÍ SNÍMAČE
Charakteristika
Kód pro inkrementální snímače je v podstatě Johnsonův kód eventuelně upravený Grayův kód, oba
minimalizovány na dvě stopy. V tomto případě nelze generovat absolutní polohu ale pouze inkrementy (přírůstky) v závislosti na velikosti změny polohy.
|
Použití
Použití kódu je určeno pro snímače odměřování polohy, které generují inkrementy (přírůstky), respektive počet impulsů v závislosti na velikosti změny
polohy. Tento typ snímačů poskytuje informaci o poloze pouze relativní, nikoliv absolutní. Inkrementální snímač musí být doplněn logikou, která generuje jednoduchý nebo čtyřnásobný počet impulsů
inkrementů v závislosti na změně polohy. Impulsy je nutno dále zpracovat v čítači, který zaznamenává počet impulsů a poskytuje číselnou informaci o počtu
impulsů od výchozí polohy. Poloha potom odpovídá násobku hodnoty čítače a velikosti inkrementu.
Výhody
- jednoduchá konstrukce odměřovacího kódu
- nízký počet signálových vodičů
- relativně nízká cena
- rozsah odměřované hodnoty je omezen pouze velikostí slova (word), na kterém je hodnota reprezentována
Nevýhody
- nutnost použití dalších modulů pro zpracování signálů (číselné zjištění hodnoty)
- po přerušení činnosti (např. výpadek napájení) je nutno provést referování (zjištění výchozí polohy)
|
Vyjádření kódu pro inkrementální snímače
Vyjádření dvou stop kódu (stejně jako u Johnsonova nebo Grayova kódu) vychází z podmínky, že při změně stavu (z aktuálního do následujícího stavu) je povolena (přípustná) změna stavu pouze v jedné stopě
(bitu) kódového slova.
| Poznámka |
| V případě více změn při přechodu mezi aktuálním a následným stavem je indikována chyba. |
Na dvou stopách, při zachování výše uvedené podmínky, je možno vyjádřit celkem čtyři možné stavy. Pro znázornění využijeme model hyperkostky (redukované
na 2D) pro čtyři možné stavy, viz obrázek 1. Jednotlivým vrcholům jsou přiřazeny konkrétní možné
stavy a to tak, že sousední vrcholy se liší změnou hodnoty pouze na jedné pozici a protilehlé vrcholy jsou vzájemně komplementní.
Pro správnou funkci platí, že pohyb z jednoho stavu do druhého je možný pouze po hranách kostky v jednom nebo druhém směru. Vpřed, ve směru hodinových
ručiček, a nebo zpět, proti směru hodinových ručiček.
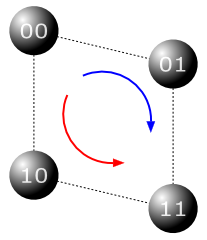
Obrázek 1
Hyperkostka pro dvěi stopy, taktéž Karnaughova mapa
Reálně je možno projít všechny vrcholy kostky tak, aby žádný z vrcholů nebyl navštíven dvakrát, což je další nutnou podmínkou. Této vlastnosti se říká,
že je splněna Hamiltonovská kružnice (Hamiltonovský graf). V opačném případě by nastala nejednoznačnost kódu.
|
Inkrementální snímač
Pro technologické aplikace, kde vyhovuje relativní odměřování polohy pomocí inkrementů, je možno aplikovat inkrementální snímač s dvěmi kódovými stopami,
viz obrázek 2a, kde každý snímač snímá stav jedné stopy. Obdobně jako u Johnsonova kódu je možno snímač konstrukčně upravit tak, že má pouze jednu stopu
(snazší výroba) a signál dvou stop se vytváří vhodným rozmístěním snímačů, viz obrázek 2b.
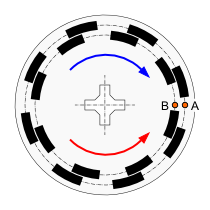 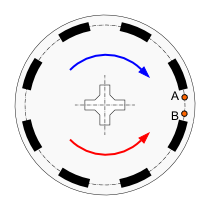
Obrázek 2a, 2b
Jednoduchý rotační kotouč pro inkrementální snímač (2 stopy)

Obrázek 3
Pravítko s kódem pro inkrementální snímač (2 stopy)
Na obrázku 3 (horní část) jsou zobrazeny dvě stopy pro lineární inkrementální snímač, které je možno upravit do jedné stopy (obrázek 3 dolní část). Z obrázků
je patrné to, že jak se mění poloha kotouče nebo pravítka, mění se i stav signálů stop, a to v závislosti na směru pohybu kódového kotouče nebo pravítka. Z toho, který signál předchází druhý, je možno určit
směr pohybu. Výsledný průběh signálů potom odpovídá stavu jednotlivých stop, viz obrázek 4.

Obrázek 4
Průběh signálů A, B inkrementálního snímače v jednom a druhém směru pohybu.
Fázové posunutí o 90°
U inkrementálních snímačů se často uvádí, že se jedná o snímač s fázovým posunutím signálů o 90°. Toto označení vychází z toho, že cyklus střídání
signálů obou stop se periodicky opakuje, což je jeden cyklus kódu, tedy 360° (nezaměňovat s otáčkou kotouče). V tomto cyklu kódu se pravidelně střídají signály
A a B, které dělí cyklus na čtyři úhlově stejné části, které jsou na obrázcích označeny stavy 0, 1, 2 a 3, což je právě 90° a signály na stopách A a B se vzájemně
(a správně) mění právě v tomto úhlu.
|
Zpracování signálů inkrementálního snímače
Signály z inkrementálního snímače nelze použít přímo pro zjištění polohy ale je nutno provést jejich úpravu pro čítač inkrementů a následné zpracování
viz obrázek 5.
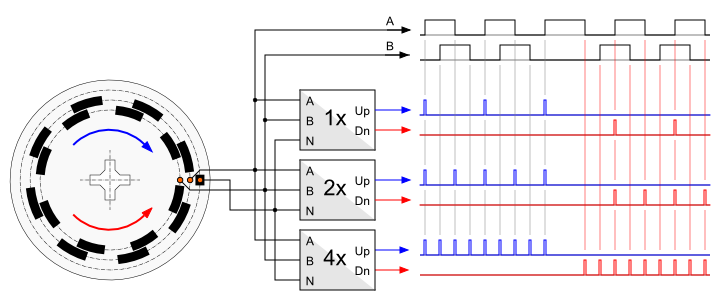
Obrázek 5
Zpracování signálů z inkrementální snímače
| Poznámka |
| U inkrementálních snímačů bývá doplněn ještě jeden snímač, v tzv. nulové stopě, na obrázku 5 na vnější kružnici, jehož význam je uveden dále v části
o zabezpečení. |
Jednoduché vyhodnocení (single)
Jednoduché vyhodnocení (obrázek 4, 1x) pracuje s celým cyklem kódu, kdy vyhodnocovací elektronika sleduje průběh signálů A a B a s náběžnou hranou
signálu A (stopy) generuje impuls. Pro kladný směr otáčení generuje impuls na výstupu Up nebo generuje impuls na výstupu Dn pro opačný směr otáčení
a to v závislosti na stavu signálu (stopy) B.
V obou případech směru otáčení je impuls generován právě jednou za cyklus kódu 360°.
Dvojnásobné vyhodnocení (double)
Dvojnásobné vyhodnocení (obrázek 4, 2x) pracuje s každou změnou signálu A (stopy). V cyklu kódu 360° jsou generovány dvě změny stavu stopy A a tedy i
dva impulsy. Pro kladný směr otáčení generuje impuls na výstupu Up nebo generuje impuls na výstupu Dn pro opačný směr otáčení a to v závislosti na
stavu signálu (stopy) B.
V obou případech směru otáčení je impuls generován právě dvakrát za cyklus kódu 360°.
Čtyřnásobné vyhodnocení (quadruple)
Čtyřnásobné vyhodnocení (obrázek 4, 4x) pracuje s každou změnou stavu signálu na stopě A i B. V cyklu kódu 360° jsou detekovány právě
čtyři změny stavu stopy A a B po 90° kódu snímače. S každou změnou stavu na stopě A nebo B je generován impuls na výstupu Up pro kladný směr otáčení
nebo na výstupu Dn pro opačný směr otáčení a to v závislosti na na stavu druhého signálu.V obou případech směru otáčení je impuls generován právě čtyřikrát
za cyklus kódu 360°.
Zpracování impulsů inkrementu
Jednoduché dvojnásobné nebo čtyřnásobné vyhodnocení se zpravidla provádí mimo elektroniku snímače. Při nízké frekvenci změn stavů na stopách A a B může
být vyhodnocení přímo realizováno programem v PLC, avšak výrobci komponent PLC standardně nabízejí HW moduly, které jsou schopny stopy inkrementálního snímače
vyhodnocovat a převádět na impulsy (1x/2x/4x) a tyto zpracovávat i na vyšších
frekvencích v čítači. Moduly taktéž poskytují další potřebné funkce.
Pro zpracování již modulovaných impulsů inkrementu (1x/2x/4x) postačí čítač, který dovoluje čítání vpřed i vzad.
Na čítací vstupy čítače se přivádí signály Up / Dn z inkrementálního snímače, které jsou jím zaznamenány (čítány). Hodnota čítače potom udává, kolik
inkrementů, přírůstků, bylo zaznamenáno, což je velikost změny polohy od výchozího stavu. Jedná se tedy o relativní odměřování polohy od předem známého
bodu. Z toho vyplývá, že před zahájením odměřování, musí být pohyblivý člen ustaven do známé polohy s pevně zadanou souřadnicí (referování /
synchronizace).
Maximální počet zaznamenaných změn, a tím i relativní vzdálenost, nezávisí pouze na dělení inkrementálního snímače (počtu impulsů na otáčku), ale i
na hodnotě, kterou je možno v čítači zpracovat (Integer, Double Integer, Long
Integer).
| Poznámka |
| Přesný odečet inkrementů platí pouze pro jednoduché vyhodnocení v úhlu 360° kódu. U násobného vyhodnocení záleží na přesnosti překrývání signálů
stopy A a B, tedy, překrývají-li se právě v úhlu 90° cyklu kódu. Toto nemusí byt vždy zaručeno pokud se používají náhradní řešení inkrementálního snímače,
například "hrubá" konstrukce pomocí indukčních snímačů místo jemného snímače s optickým kotoučem. |
|
Zabezpečení a kontrola
Ačkoliv se používá kód, který je sám o sobě bezpečný pro zjištění změny polohy, je nutno uvažovat i o možnosti selhání dalších komponent.
Může se jednat o následující závady:
- selhání snímačů stop(y)
- selhání stopy jako takové
- přerušení jednoho nebo více vodičů
- vynechání jednoho nebo více cyklů kódu
Za účelem detekce těchto závad (nikoliv k jejich eliminaci) se používá složitější konstrukce inkrementálního snímače.
Nulová značka
Nulová značka s označením N nebo Z, viz obrázek 6a, b je doplněna do další (vnější) stopy snímače tak, aby k její aktivaci docházelo právě jednou za otáčku
snímače. Kontrola potom probíhá tak, že při průchodu snímače touto nulovou značkou je zkontrolován počet přijatých impulsů od posledního průchodu touto značkou
v jednom směru pohybu.
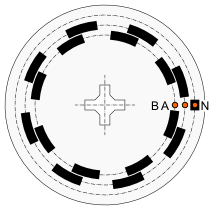 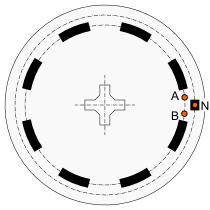
Obrázek 6a, b
Rotační kotouč pro inkrementální snímač s nulovou značkou (2 stopy)
Počet impulsů na otáčku snímače musí odpovídat výrobnímu parametru snímače, pokud je počet zaznamenaných impulsů v jednom směru a při dokončení otáčky
snímače menší než výrobní parametr, znamená to, že některá nebo obě stopy nepracují správně. Pokud je zaznamenán počet impulsů větší než je parametr
snímače, znamená to, že nepracuje správně stopa nulové značky.
Výše uvedená kontrola jedenkrát za otáčku ale nefunguje u lineárních snímačů, protože by k průchodu nulovou značkou docházelo pouze v jednom bodě dráhy.
Používá se tedy řešení, kdy je pravidelně, po zvolené vzdálenosti odpovídající konkrétnímu počtu impulsů, opakovaně vložena nulová značka, jednou za
periodu, viz obrázek
7.
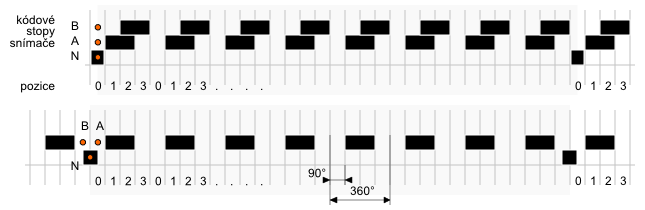
Obrázek 7
Pravítko kódem pro inkrementální snímač (2 stopy)
Vyhodnocení a kontrola je potom shodná jako u rotačního provedení.
| Poznámka |
| Nulová značka bývá taktéž používána k vytvoření referenčního bodu v rámci snímače. |
Párování signálů
Výše uvedená metoda použití nulové značky však není absolutně jednoznačná, protože může dojít i k závadě mimo snímač, konkrétně v přenosu signálů
jako je přerušení nebo zkrat vodiče. Tyto stavy je možno následně detekovat tehdy, je-li ke každému signálu stopy (A, B, N) doplněn signál obráceného stavu
(negovaný), viz obrázek 8.
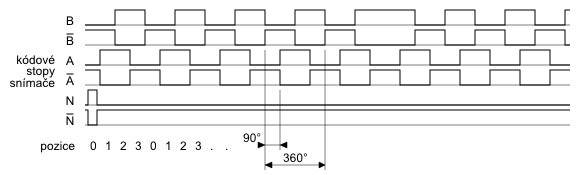
Obrázek 8
Průběh párovaných signálů A, B, N inkrementálního snímače (včetně změny směru).
Porovnáním stavu párovaných signálů je možno vyhodnotit stav přenosu signálů jednotlivých stop.
|
Příklad
Obrázek 9 ukazuje příklad jednoduchého dělícího kotouče pro optické snímání, který se používá (používal) u polohovacích zařízení s mechanickým přenosem
pohybu a s malým nárokem na přesnost, konkrétně počítačová myš.
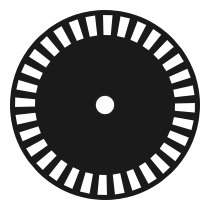
Obrázek 9
Dělící kotouč počítačové myši
Optické prosvětlování, viz obrázek 10, nemusí být realizováno přesně tak, jak je naznačeno body na obrázku 2b, ale místa prosvětlování mohou ležet různě po
obvodu stopy. Podmínkou je pouze to, že úhlová rozteč musí odpovídat násobku cyklu kódu tak, aby bylo zachováno fázové posunutí..
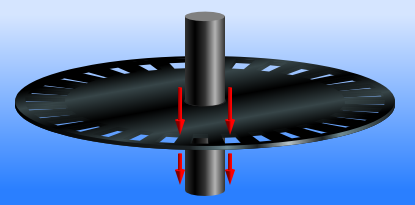
Obrázek 10
Prosvětlování kotouče počítačové myši
|
|
|
PLC-AUTOMATIZACE - DATA - KÓDOVÁNÍ / DEKÓDOVÁNÍ - KÓD PRO
INKREMENTÁLNÍ SNÍMAČE
|

