Dynamické řízení bodů znakové matice
Pokud bychom skutečně chtěli řídit maticové zobrazovače přímo výstupy PLC, můžeme vyjít z principu
funkce znakového generátoru pro maticové zobrazovače. Při řízení bodů zobrazovače
musíme vyjít z vnitřního uspořádání a zapojení jednotlivých bodů zobrazovače, viz obrázek 1, kde je naznačen i princip řízení.
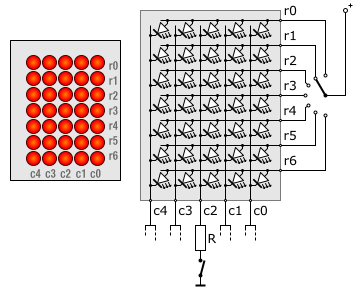
Obrázek 1
Dynamické řízení maticových zobrazovačů.
Princip funkce zůstane zachován jako u hardwarového generátoru, tedy postupná aktivace bodů po jednotlivých řádcích (přivedení napětí)
a synchronní přizemnění bodů, které mají být na řádku v daný okamžik rozsvíceny, to vše v rychlém dynamické režimu. Principiální zapojení
pro dynamické řízení maticových zobrazovačů je uvedeno na obrázku 2.
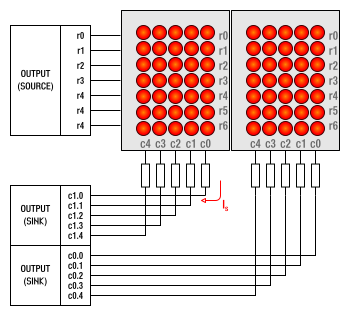
Obrázek 2
Dynamické řízení maticových zobrazovačů.
Pro realizaci tohoto řízení potřebujeme dva druhy výstupů, source a sink. Výstupy typu source postupně spínají
napájení pro jednotlivé řádky bodů na zobrazovačích a výstupy typu sink přizemňují sloupcové body, které mají být na konkrétním
řádku zobrazovače rozsvíceny. Časový diagram obsluhy zobrazování je uveden na obrázku 3.
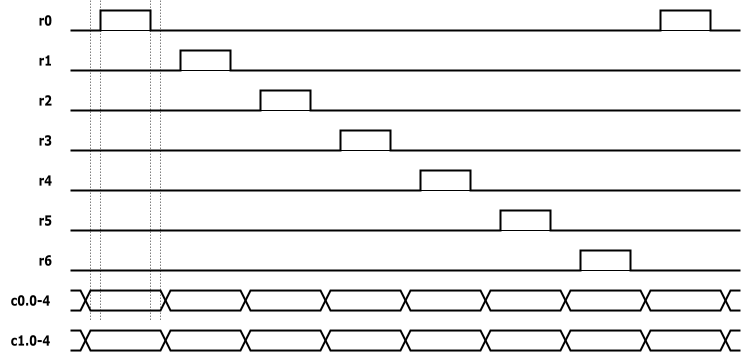
Obrázek 3
Časový diagram řízení maticových zobrazovačů.
Řízení maticového zobrazovače probíhá cyklicky, kdy jsou postupně aktivovány výstupy r0 až r6 a na výstupech
c0.0-4 a c1.0-4 je poskytována informace o tom, které body na řádku mají být rozsvíceny. Při tomto je ale nutno
dodržet časové závislosti pro omezení nesprávného svitu bodu. Nejprve je nutno v generátoru pro maticové zobrazovače vybrat kombinaci
bitů, které odpovídají svitu konkrétních bodů na daném řádku zobrazovače a tuto odeslat na výstupy c0.0-4 a výstupy c1.0.4 pro druhý
znak. Teprve s malým zpožděním (dané rychlostí překlopení výstupu, resp. podle max. frekvence výstupu) aktivovat příslušný výstup r0-6
pro rozsvícení řádku. Před změnou kombinace na výstupech c0.0-4 a c1.0.4 (pro další řádek znaku) je potřeba s malým předstihem deaktivovat
výstup řádku r0-6.
Programový generátor znaků
Při tomto, přímém, způsobu řízení jednotlivých bodů zobrazovače je zřejmé, že v programu musí být použit
programový (SW) generátor znaků, který požadovaný znak k zobrazení převede na odpovídající
kombinaci svitu jednotlivých bodů, po jednotlivých řádcích.
Programová obsluha
Programová obsluha založená na softwarovém generátoru znaků je z principu dynamická, tedy je nutno trvale měnit stav
výstupů pro postupné zobrazování jednotlivých bodů. Mimo toto nutné chování je možno provádět blikání znaku tím, že jej v jedné,
pro oko viditelné periodě zobrazujeme, a v další periodě nerozsvěcíme žádný bod. Dalším případem může být zobrazení
"plovoucí čáry", kdy se tato pohybuje vodorovně nebo svisle nebo zobrazení různě vysokého sloupce a pod.
Dynamické řízení maticových, znakově orientovaných zobrazovačů s větším počtem segmentů
Přímé řízení s větším počtem zobrazovaných znaků se principiálně neliší od výše uvedeného příkladu, je však nutno více výstupů
pro řízení svitu sloupců i případné proudové posílení zdroje pro řádky.
Shrnutí
| Podmínky: | Řídící signály musí být elektricky přizpůsobeny zobrazovačům. |
| Výhody: | Možnost vytvoření vlastního znaku, animace, nepotřebuje externí generátor znaků (HW). |
| Nevýhody: | Náročná programová obsluha, vyšší počet řídících signálových vodičů. |
| Řízení: | Řízení z PLC možné ale nepraktické. |
|